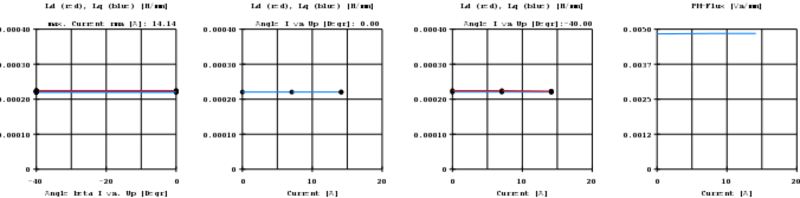
Ld and Lq identification¶
Call: Rotating Machine (r/phi-coordinate-system)
Data for the “Ld/Lq identification” procedure
Example for the call:
m.move_action = 0.000 -- Move Action: rotate=0; linear=1
m.arm_length = 100.000 -- Effect. armature length [mm]
m.num_pol_pair = 2.000 -- Number of Pole pairs (>= 1)
m.npols_gen = 1.000 -- Number of Poles simulated (>= 1)
m.speed = 3000.000 -- Speed: rotate [1/min]
m.skew_angle = 0.000 -- Skew angle [Deg; mm]
m.nu_skew_steps = 0.000 -- No of skew sect:>0:finite;0:infinite
m.current = 20.000 -- Nominal stator coil current(Peak) [A]
m.num_par_wdgs = 1.000 -- Number of parallel Windings (>= 1)
m.magn_temp = 20.000 -- Temperature Magnet [Deg C]
m.fc_radius = 34.250 -- Radius air-gap center (torque) [mm]
m.num_cur_steps = 2.000 -- Number of current steps <= 15
m.nu_beta_steps = 2.000 -- Number of beta angle steps <= 15
m.beta_max = 0.000 -- Beta angle maximum
m.beta_min = -40.000 -- Beta angle minimum
m.nu_move_steps = 46.000 -- Number of move steps
m.range_phi = 180.000 -- Move range angle
m.phi_start = 0.000 -- Start angle
m.pm_eff_aktiv = 0 -- keine interaktionen \n
m.pocfilename = 'xyz.poc'
run_models("ld_lq_fast")