Simulation PM/Reluctance motor¶
Call: Rotating Machine (r/phi-coordinate-system)
Data for the “PM/Reluct.Motor Simul.” procedure
The optional declaration of the second air gap (parameter m.fcradius2) is available since FEMAG-version 8.2.3.
m.move_action = 0.0 -- Move Action: rotate=0; linear=1
m.arm_length = 100.0 -- Effect. armature length [mm]
m.num_pol_pair = 2 -- Number of Pole pairs (>= 1)
m.npols_gen = 1 -- Number of Poles simulated (>= 1)
m.speed = 3000.0 -- Speed: rotate [1/min]
m.skew_angle = 0.0 -- Skew angle [Deg; mm]
m.nu_skew_steps = 0 -- No of skew sect:>0:finite;0:infinite
m.eval_force = 0 -- Evaluate force density: no = 0;yes >0
m.current = 20.0 -- Nominal stator coil current(Peak) [A]
m.angl_i_up = 0.0 -- Angle current I vs. voltage Up [Deg]
m.num_par_wdgs = 0 -- Number of parallel Windings (>= 1)
m.magn_temp = 20.0 -- Temperature Magnet [Deg C]
m.fc_radius = 34.25 -- Radius air-gap center (torque) [mm]
m.fc_radius2 = 0.0 -- Radius 2. air-gap center [mm] (opt. param.)
m.optim_i_up = 0 -- Optimize < I vs Up : no = 0; yes > 0
m.calc_fe_loss = 1.0 -- Calculate Losses:>0; areas>0; no = 0
m.nu_move_steps = 49 -- Number of move steps
m.range_phi = 180.0 -- Move range angle
m.phi_start = 0.0 -- Start angle
m.pm_eff_aktiv = 0 -- Generate additional output (>=1) \n
m.fc_mult_move_type = 1.0 -- Type of move path in air gap (1=circ)
m.fc_force_points = 0 -- Number of move points in air gap \n
m.period_frac = 1 -- Fraction of rotation range: 1 full, 6: 1/6 Period
m.pocfilename = 'xyz.poc'\n
-- additional flux output in BCH/BATCH file (optional)
m.flx_x={}
m.flx_y={}
m.flx_x[1], m.flx_y[1] = pr2c((da1/2+h), math.pi/m.tot_num_sl)
m.flx_x[2], m.flx_x[2] = pr2c((dy1/2), math.pi/m.tot_num_sl)\n
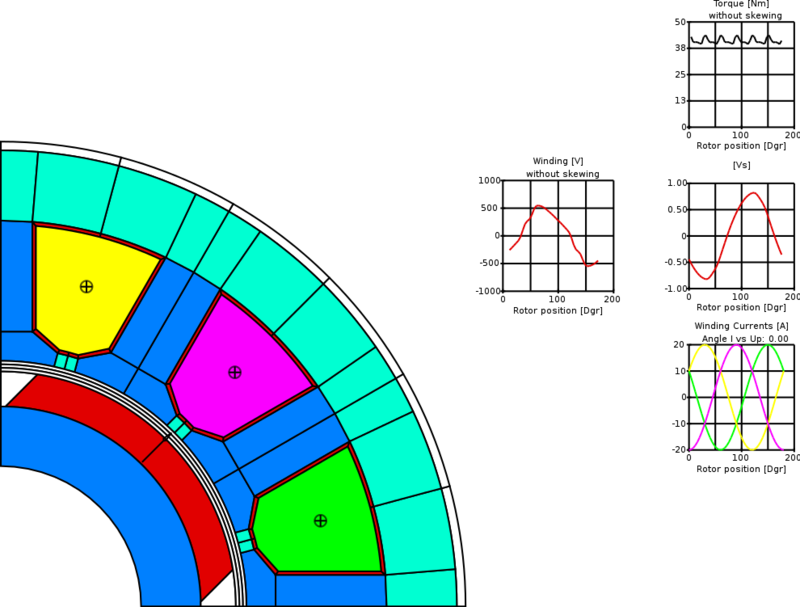
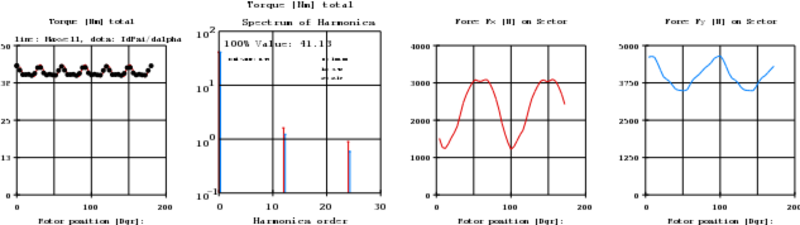
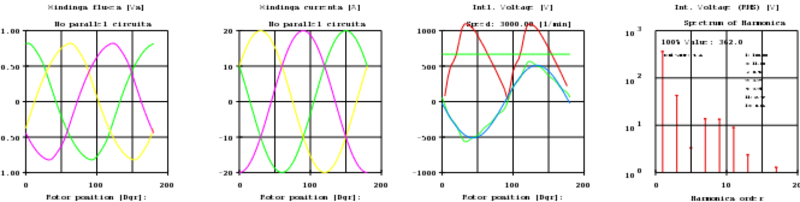
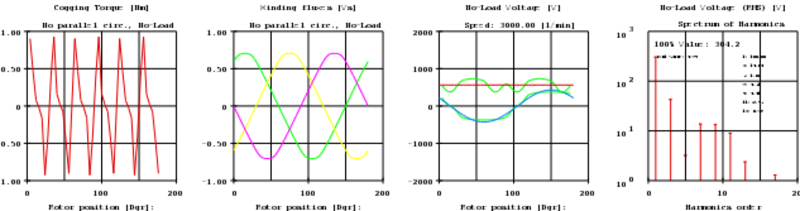
run_models("pm_sym_fast")
Call: Linear Machine (x/y- and r/z-coordinate-system)
Data for the “PM/Reluct.Motor Simul.” procedure
Example for the call:
-- movement in x-direction
m.move_action = 1.000 -- Move Action: rotate=0; linear=1
m.arm_length = 700.000 -- Effect. armature length [mm]
m.num_pol_pair = 1.000 -- Number of Pole pairs (>= 1)
m.two_pole_wi = 72.000 -- 2 X pole width [mm]
m.speed_linear = 30.000 -- Speed: linear [m/s]
m.skew_linear = 0.000 -- Skew displacement [mm]
m.nu_skew_steps = 0.000 -- No of skew sect:>0:finite;0:infinite
m.eval_force = 0.000 -- Evaluate force density: no = 0;yes >0
m.current = 10.000 -- Nominal stator coil current(Peak) [A]
m.angl_i_up = 0.000 -- Angle current I vs. voltage Up [Deg]
m.num_par_wdgs = 1.000 -- Number of parallel Windings (>= 1)
m.magn_temp = 20.000 -- Temperature Magnet [Deg C]
m.line = 1.000 -- Move path: line: 0 ; poly line: 1
m.npols_gen = 1.000 -- Number of Sectors simulated (>= 1)
m.calc_fe_loss = 1.000 -- Calculate Losses:>0; areas>0; no = 0
m.nu_move_steps = 73.000 -- Number of move steps
m.range_x = 72.000 -- Move range x [mm]
m.range_y = 0.000 -- Move range y [mm]
m.pm_eff_aktiv = 0.000 -- Generate additional output (>=1)
m.optim_i_up = 0.000 -- Optimize < I vs Up : no = 0; yes > 0 \n
m.fc_mult_move_type = 1.000 -- Type of move path in air gap
m.fc_force_points = 5.000 -- number move points in air gap
m.fcpx_mm1 = -1.000 -- x-coord of polyline [mm]
m.fcpy_mm1 = 101.500 -- y-coord of polyline [mm]
m.fcpx_mm2 = 72.500 -- x-coord of polyline [mm]
m.fcpy_mm2 = 101.500 -- y-coord of polyline [mm]
m.fcpx_mm3 = 72.500 -- x-coord of polyline [mm]
m.fcpy_mm3 = 118.500 -- y-coord of polyline [mm]
m.fcpx_mm4 = -1.000 -- x-coord of polyline [mm]
m.fcpy_mm4 = 118.500 -- y-coord of polyline [mm]
m.fcpx_mm5 = -1.000 -- x-coord of polyline [mm]
m.fcpy_mm5 = 101.500 -- y-coord of polyline [mm] \n
m.pocfilename = 'xyz.poc'
run_models("pm_sym_fast")